
Нечеткая модель управления контейнерным краном.
Санкт-Петербургский Государственный Университет. Факультет ПМ-ПУ. Санкт-Петербург, 2008.
Содержание:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Этапы подготовки.
В данном разделе конкретизируем наши эвристические правила, зададим переменные и проведем их фазификацию, для последующей работы над ними в системах нечеткого вывода.
Формирование базы правил систем нечеткого вывода.
Преобразуем рассмотренные в предыдущем пункте 5 эвристических правил в следующие 6 правил нечетких продукций. Основным результатом нашей системы управления будет являться построение зависимости мощности двигателя от расстояния до цели и угла между перпендикуляром к кабине и тросом, ведущим к грузу. Итак:
1. ЕСЛИ "расстояние далекое" И "угол равен нулю" ТО "мощность положительно средняя"
2. ЕСЛИ "расстояние далекое" И "угол отрицательно малый" ТО "мощность положительная большая"
3. ЕСЛИ "расстояние далекое" И "угол отрицательно большой" ТО "мощность положительно средняя"
4. ЕСЛИ "расстояние среднее" И "угол отрицательно малый" ТО "мощность отрицательная средняя"
5. ЕСЛИ "расстояние близкое" И "угол положительный малый" ТО "мощность положительная средняя"
6. ЕСЛИ "расстояние ноль" И "угол равен нулю" ТО "мощность равна нулю"
В процессе формирования базы правил мы разделили второе эвристическое правило на 2 правила, с целью представления их в простом формате ЕСЛИ-ТО. Расстояние будем считать отрицательным, когда кабина будет находится справа от цели.
Фазификация переменных.
Для построения модели системы нечеткого управления контейнерным краном в первую очередь следует для всех переменных определить соответствующие лингвистические переменные: расстояние, угол и мощность мотора. Каждая из них будет включать в себя 5 термов. При этом будем использовать кусочно-линейные функции принадлежности, а так же функции принадлежности для одноточечных множеств. Рассмотрим каждую из них.
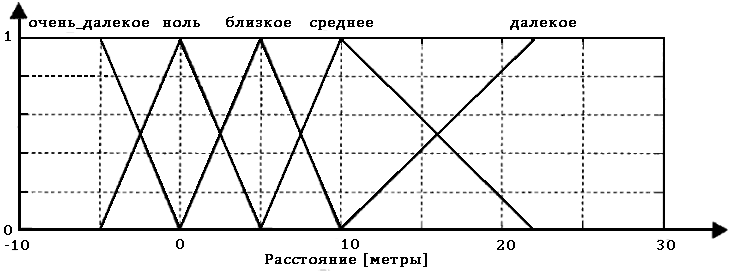
Как нетрудно догадаться это - графики функций принадлежности для термов лингвистической переменной расстояние.
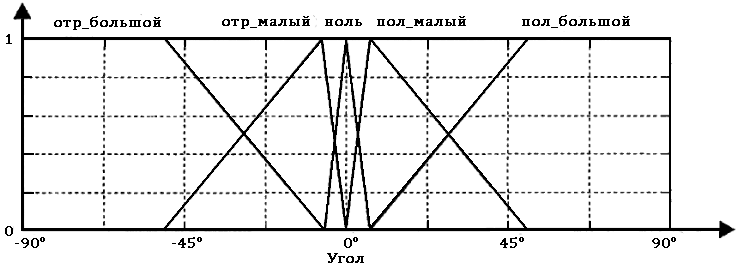
Это - графики функций принадлежности для термов лингвистической переменной угол.
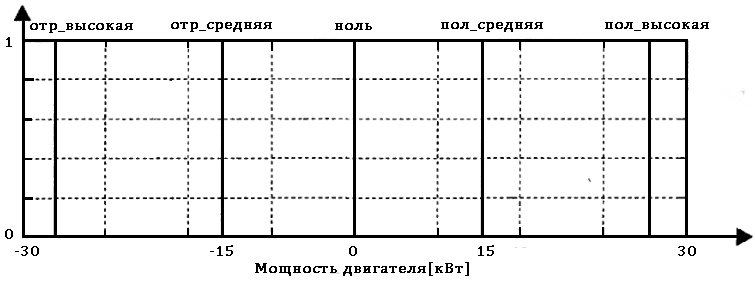
А это в свою очередь - графики функций принадлежности для выходной лингвистической переменной мощность.