
Нечеткая модель управления контейнерным краном.
Санкт-Петербургский Государственный Университет. Факультет ПМ-ПУ. Санкт-Петербург, 2008.
Содержание:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Заключение.
Подводя итоги, можно сказать об успешном выполнении задачи по построению нечеткой модели управления контейнерным краном. Мы выполнили задачу в двух системах нечеткого вывода. Заметим, что результаты работы на контрольных данных РАССТОЯНИЕ = 7.5 и УГОЛ = 10 СОВПАЛИ и на выходе мы получили МОЩНОСТЬ = 12, что является результатом, подтвержденным опытом непосредственно работников-крановщиков. Таким образом, можно заявить о правдоподобности построенных моделей.
Рассмотрим в совокупности получившиеся визуализации моделей:
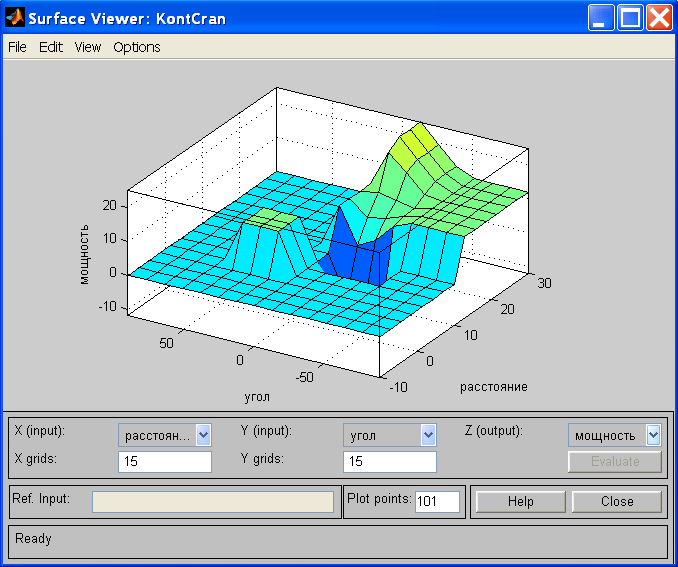
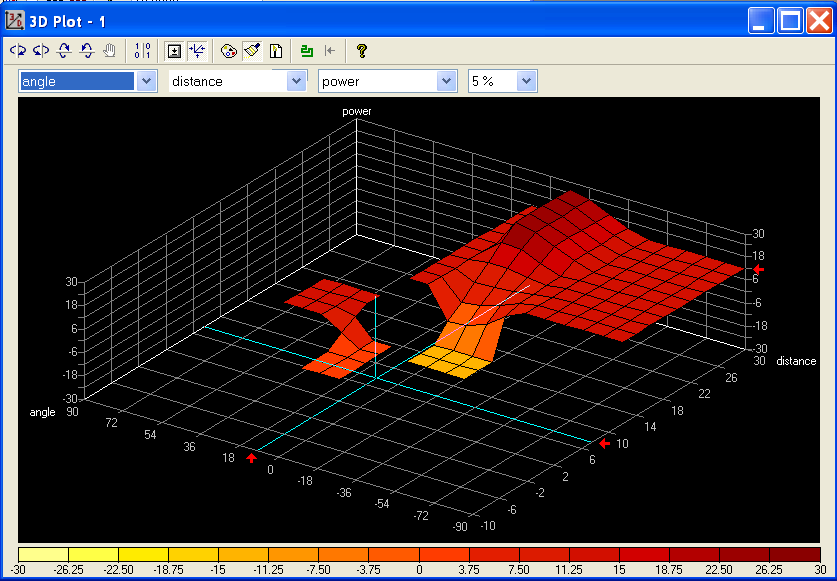
Обе системы выдали одинаковые результаты, с той лишь разницей, что во второй модели на поверзности нечеткого вывода присутствуют разрывы, что может повлечь неустойчивость модели при непосредственном внедрении ее в системы управления. Определим дальнейшие направления исследований.