
Нечеткая модель управления контейнерным краном.
Санкт-Петербургский Государственный Университет. Факультет ПМ-ПУ. Санкт-Петербург, 2008.
Содержание:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Реализация в системе MatLab.
Запустим программу и откроем редактор системы нечеткого вывода FuzzyLogic. Для этого можно ввести команду fuzzy в командной строке программы.

По-умолчанию установлен алгоритм вывода Мамдани. Альтернативой к нему является алгоритм Сугено, но оставим первый вариант, т.к. наши правила наиболее лучшим образом удовлетворяют первому алгоритму. Для определения степеней истинностей условия каждого правила системы нечеткого вывода будем использовать min-конъюнкцию (т.к. в правилах 1-6 в качестве связки используется только нечеткая конъюнкция («И»)). Согласно алгоритму Мамдани, в процессе композиции используем метод max-дизъюнкции. Приведение к четкости осуществим при помощи метода центра тяжести.
После этого включим в нашу систему 2 входных переменных (расстояние и угол) и одну выходную(мощность). Приступим к их редактированию двойным щелчком левой кнопки мыши на каждой из них.
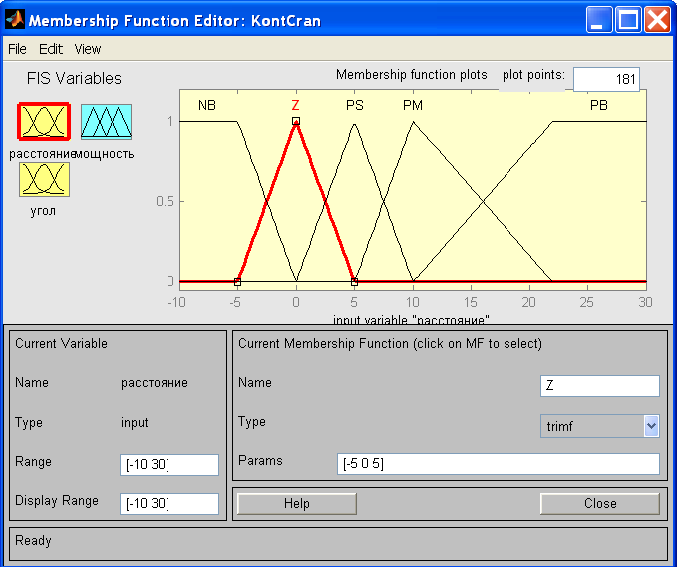
Для переменной расстояние используем 5 функций принадлежности для каждого из термов в соответствии с пунктом подготовки данных.

Аналогично поступим и с переменной угол.

К сожалению, система MatLab не содержит в себе функций одноточечных множеств и это побудило использовать в качестве замены оных треугольные функции принадлежности для каждого из термов, максимально приближенные к одноточечным. Выразим надежду на учет этого фактора в последующих версиях программного продукта.
Теперь перейдем к заданию правил. Для этого дважды щелкнем левой кнопкой мыши по центру проекта:
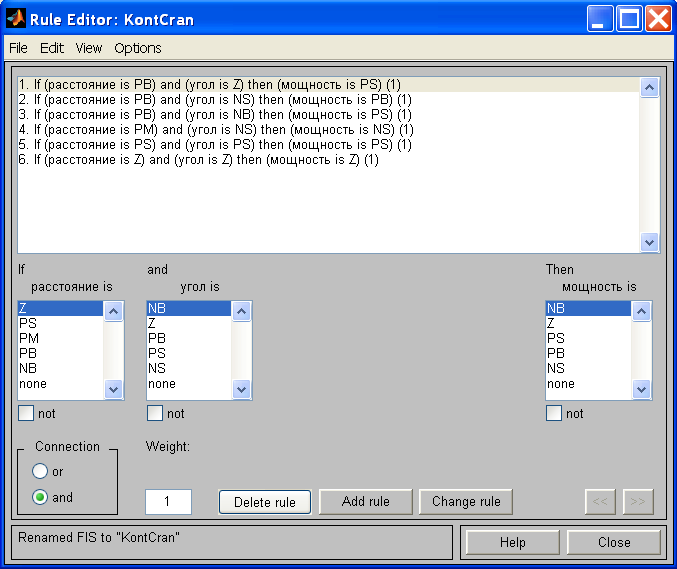
Введем все правила нечетких продукций так же, как мы и определили в процессе подготовительного этапа.
Выполнив все эти этапы, мы нечеткую систему
управления контейнерным краном. Самое время перейти к этапу
тестирования. Для этого мы откроем Rule-Viewer: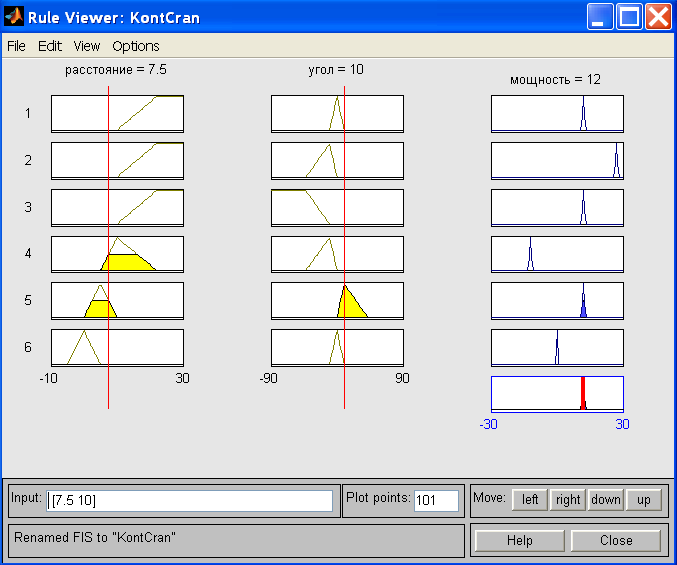
Зададим значение переменной расстояние равное 7.5, а значение переменной угол равное 10. Получим значение мощности на выходе равное 12. Для пытливого читателя замечу, что система тестирования правил представляет дополнительный интерес из-за наличия возможности в реальном времени изменять значение переменных и смотреть на результат.
Теперь перейдем к просмотру общей зависимости путем рассмотрения поверхности отклика, для этого запустим View-Surface:
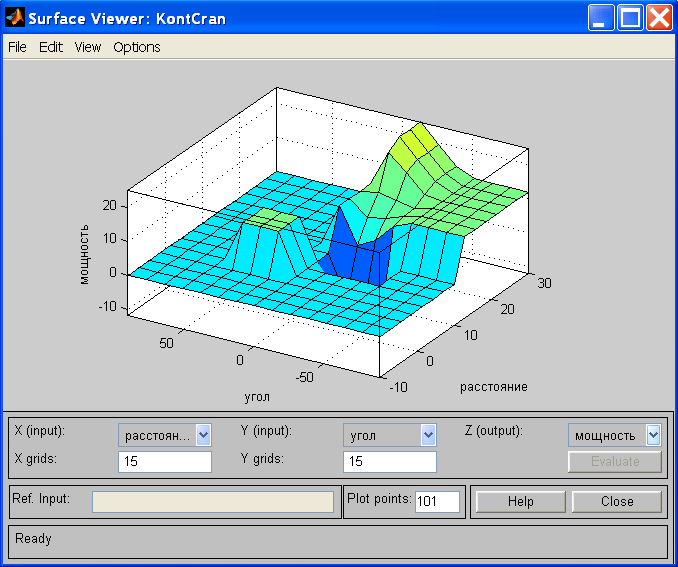
Итак, мы завершили построение нечеткой системы управления контейнерным краном с помощью системы MatLab. Рекомендую читателю запомнить контрольные значения с целью их последующего сравнения.