
Нечеткая модель управления контейнерным краном.
Санкт-Петербургский Государственный Университет. Факультет ПМ-ПУ. Санкт-Петербург, 2008.
Содержание:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Реализация в системе FuzzyTech.
После открытия программы воспользуемся утилитой создания нового проекта, в процессе работы которой пользователю будет предложено ввести различные параметры системы, такие как: имя проекта, кол-во входных и выходных переменных, кол-во баз правил и т.д. Предоставим читателю сделать это самостоятельно. После окончания работы утилиты мы увидим следующее окно:
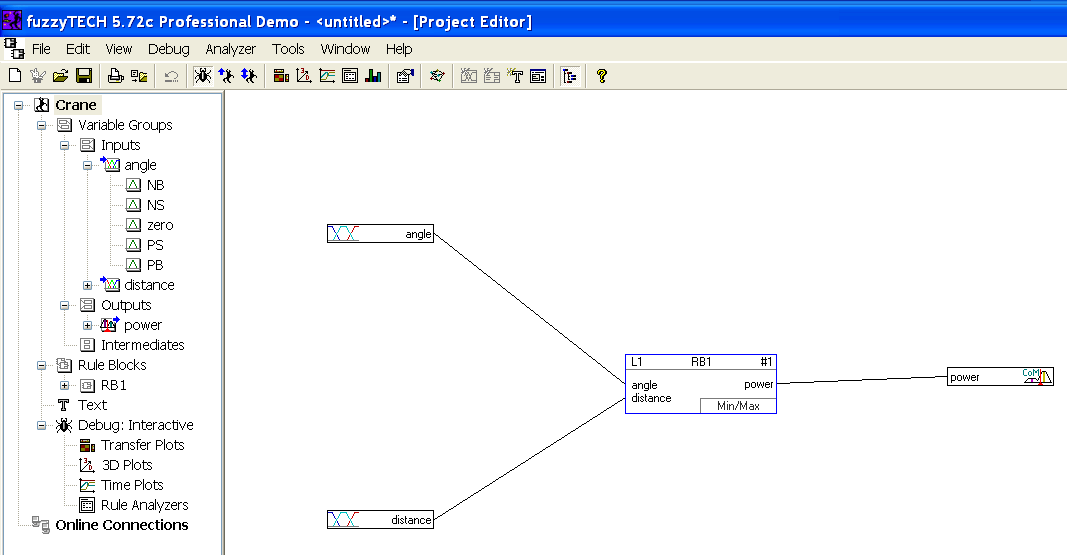
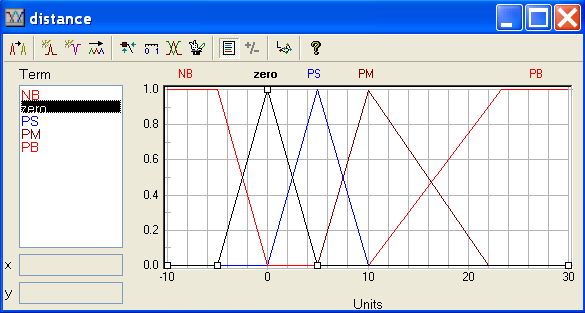
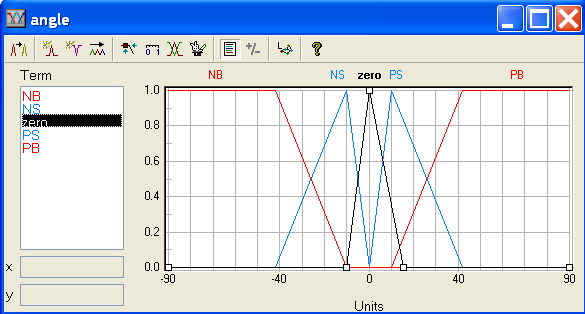
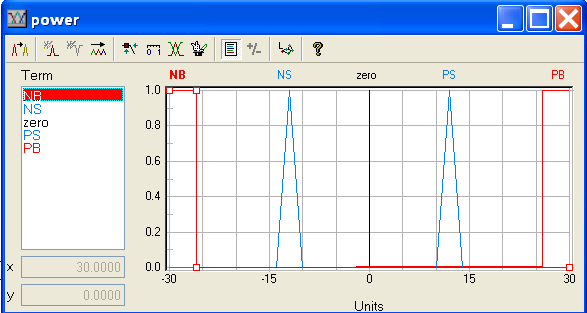
Приступим к последовательному редактированию переменных, щелкнув правой кнопкой мышки на каждой из них.
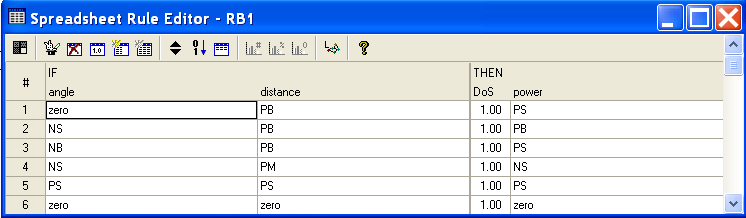
После этого, открываем уже созданный нами блок правил и заполняем его в соответсвии с этапом подготовки.
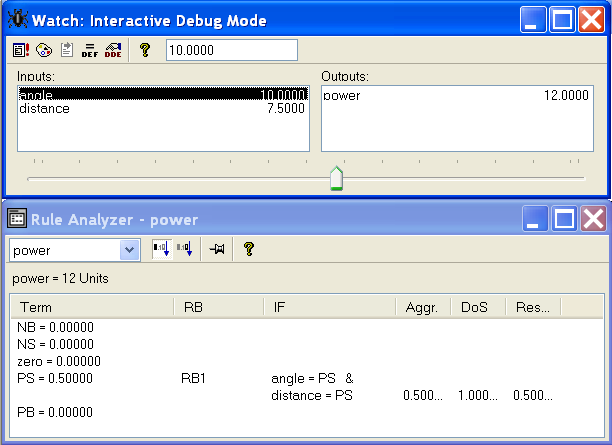
Теперь мы задали нашу систему и можем приступить к ее анализу. На мой взгляд, этот программный продукт представляет более лучшие утилиты для анализа точности системы, впрочем, это лишь субъективное мнение. Запустим режим Interactive Debug и введем значение угла равное 10, а значение расстояния равное 7.5. На выходе система выдает значение мощности, равное 12.
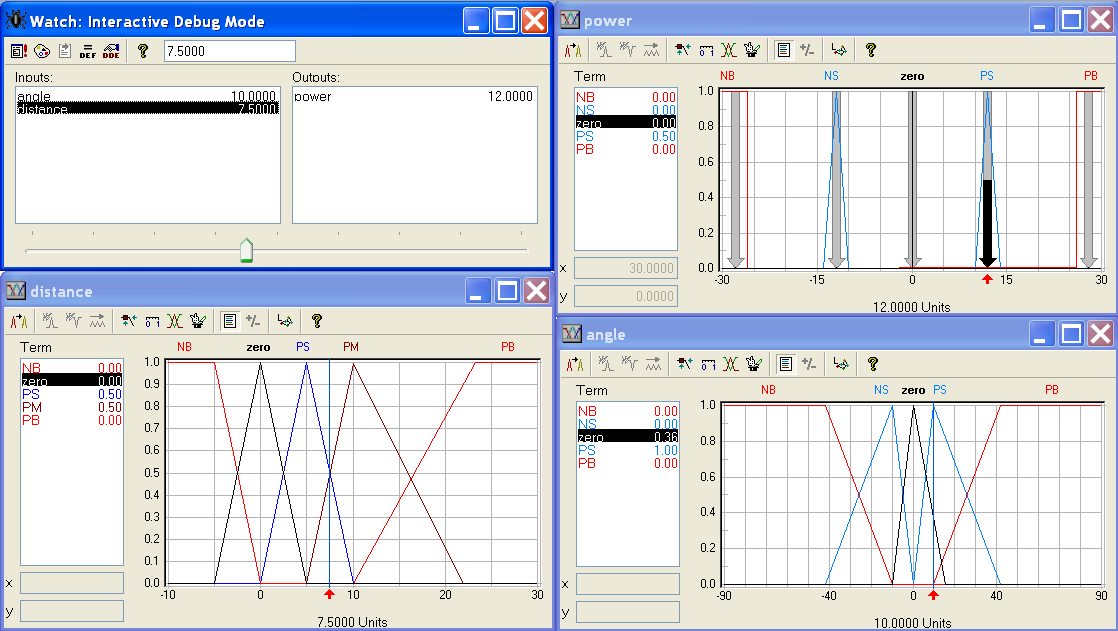
Теперь визуализируем нашу модель, с целью более глубокого понимания результатов ее работы.
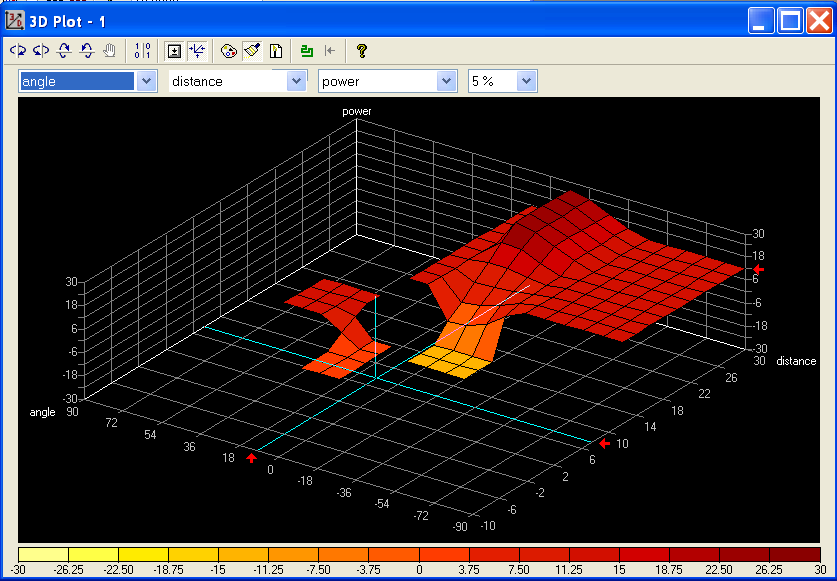
Итак, на этом завершается процесс построения модели в системе FuzzyTech. Самое время перейти к выводам.